気温ラマンライダー用の多波長分光検出器を開発
―気温・水蒸気量をいつでも安定に同時計測し、 線状降水帯などの豪雨予測への貢献を期待― 本開発は、京都大学生存圏研究所と英弘精機株式会社の共同研究の成果です。
このたび、京都大学生存圏研究所の矢吹特任准教授の研究グループ(以下 京都大学)と英弘精機株式会社(社長:長谷川 壽一、以下 英弘精機)は、深紫外波長※1のレーザー光を用いて気温の高度分布を計測するラマンライダー用の迷光※2の少ない多波長分光検出器を共同開発しました。先行して開発された水蒸気量の高度分布を計測するラマンライダーに追加することで、気温・水蒸気量を昼夜問わず安定に同時計測することが可能となり、線状降水帯※3や局所的な豪雨などの予測精度向上に寄与できると期待されます。
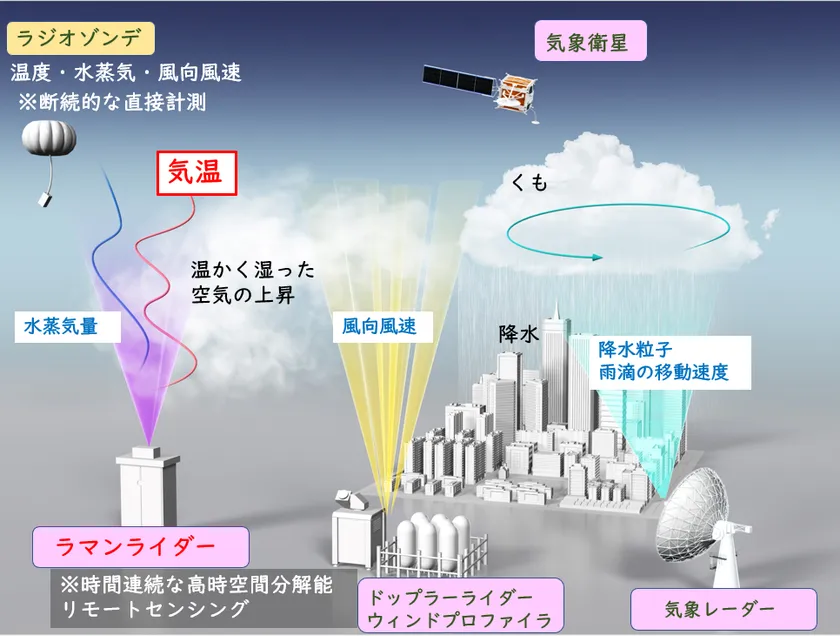
図 気温・水蒸気ラマンライダーの気象分野における活用イメージ。雲生成前の大気を計測することで、大雨をもたらす雲の発生をより早期に予測できることが期待されています。
近年、全国各地で水災害の激甚化が深刻な問題となっており、気象予報精度をさらに向上できれば、被害低減にもつながり得ることが期待されます。大気境界層※4における気温・水蒸気量の鉛直分布の高頻度・高精度の観測は、水災害を引き起こす局地的な降水過程の理解や、気象予報精度の改善に役立ちます。光を用いたリモートセンシング手法の一つであるラマンライダー※5は、光源波長からシフトした波長帯に現れる空気分子からの微弱なラマン散乱光※6を分光計測することで、高度ごとの気温と水蒸気量の情報を得ることができます。気温は、温度により形状が変化する純回転ラマンスペクトル※6の計測から求めますが、実用性の高い多波長検出法ではスペクトルの中心に現れる強い弾性散乱光※7(レーザー波長と同じ波長に現れる散乱光)の除去が課題となっていました。
1.背景
激甚化する豪雨災害に対応するため、上空の気温と水蒸気量の分布状態をリモートセンシング手法により地上から計測するラマンライダーを2014年より京都大学と英弘精機で共同開発してきました。ラマンライダーでは、レーダー等では検出が難しい水蒸気量の高度分布が得られるため、大雨をもたらす雲の発生をより早期に予測できることが期待されています。先行して完成した水蒸気ラマンライダーは2017~2018年に森林域で、2019年以降は都市域で実証観測を行い、現在は製品化に向けた取組が行われています。気温ラマンライダーは、空気分子の回転ラマン散乱光のスペクトル形状が気温によって異なるという性質を用いて気温を推定します。従来の方法は、干渉フィルターを用いて2波長のみの散乱光強度を計測することによりスペクトル形状の一部の変化を捉えるものですが(図1左)、波長精度の高い干渉フィルター※8と周波数安定化のための制御装置が付いたレーザーが必要であり、また光入射角などの光学系の高度な調整が必要でした。
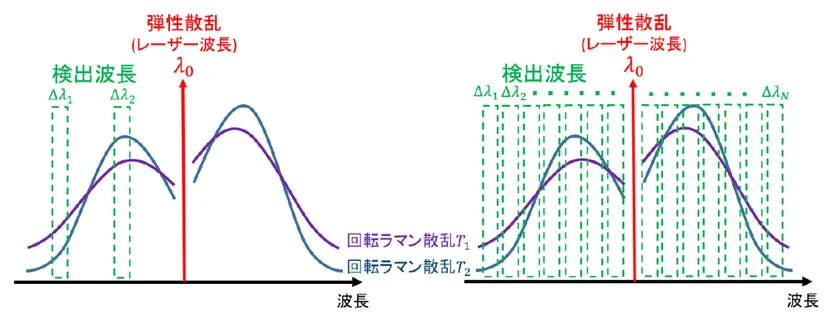
図1 回転ラマン散乱光スペクトルの検出方法。左:干渉フィルターを用いた分光検出(従来手法)、右:多波長分光検出器を用いた分光検出(本手法)
2.研究手法・成果
本研究で開発した多波長分光検出器では、分光器とアレイ検出器※9により、レーザー波長を中心としてその両側に現れる回転ラマン散乱光スペクトルの形状を高い波長分解能で捉えることができるため(図1右)、精度良く気温を推定することができます。また、ソフトウェア制御によって回折格子の角度を変えることで計測波長を調整できることから、光学系の高度な調整技術を必要としないという利点があります。しかしながら、回転ラマン散乱光スペクトルの波長の中心に現れる強い弾性散乱光により生じる迷光が、正確なスペクトル計測を妨げ、気温推定精度を低下させる要因となっていました。
そこで、本研究では、弾性散乱光による迷光の影響を10-7以下にまで減衰させる多波長分光検出器を開発しました(図2)。開発した多波長分光検出器は、回折格子を用いた分光器2台を接続し、その光路中に特定波長のみを減衰させる空間フィルターを設けることでスペクトルの歪みを最小限に抑えつつ弾性散乱光を減衰させることができます。スペクトル強度はアレイ検出器で波長ごとに計測されるので、高い波長分解能の検出が可能となり、回転ラマン散乱光スペクトルの幅が狭くなる深紫外波長のレーザーを光源とするラマンライダーにも適用可能です。
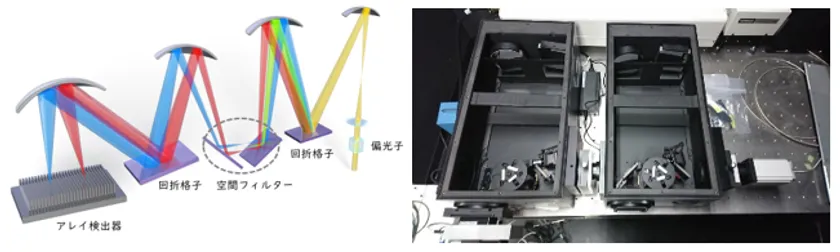
図2 開発した多波長分光検出器の構成(左:構成図、右:写真)
大気からの微弱な散乱光を検出するラマンライダーは、太陽光がノイズとして重なる日中の観測精度に課題がありました。本研究グループでは、太陽光にほとんど含まれない深紫外波長(ソーラーブラインド波長)のレーザーを用いた水蒸気ラマンライダーを開発し、通年の水蒸気量を昼夜連続で安定観測することに成功しています。この深紫外水蒸気ラマンライダーに、今回開発した気温計測部を加えて、京都大学生存圏研究所信楽MU観測所にて実証実験を行いました(図3)。計測された回転ラマン散乱光スペクトルは気温ごとに異なるスペクトル形状を示しており、また中心付近の強い弾性散乱光が除去されていることを確認しました(図4)。ラマンライダーで計測された気温と、気球に直接観測装置を吊り下げて放球するラジオゾンデで観測された気温を比較すると、高度約1,000mの大気境界層付近まで整合した気温分布が求まることを確認しました(図5)。
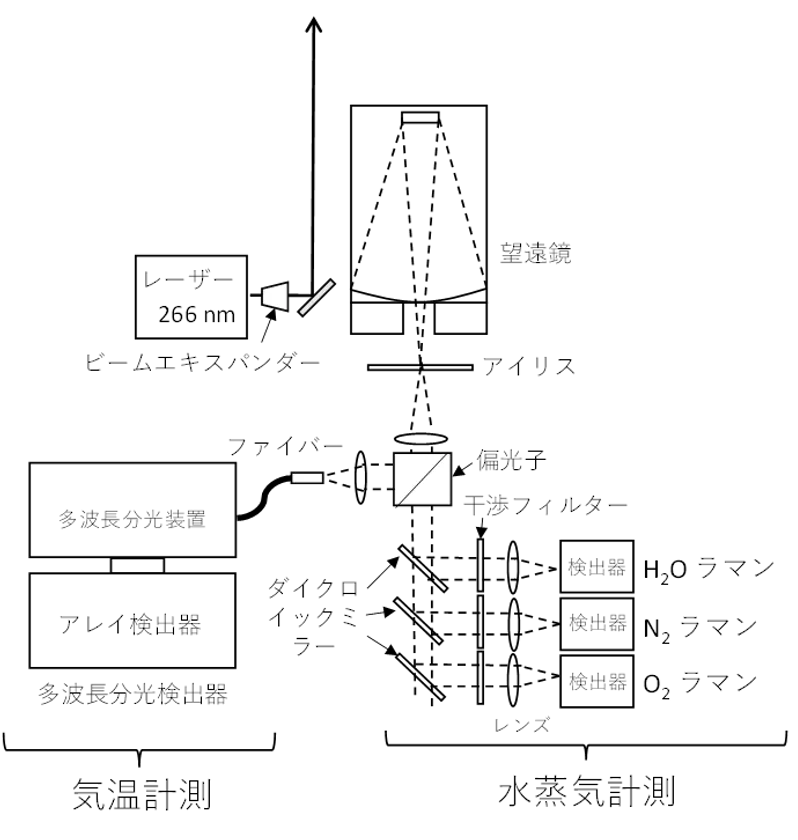
図3 気温・水蒸気同時計測用ラマンライダーの構成
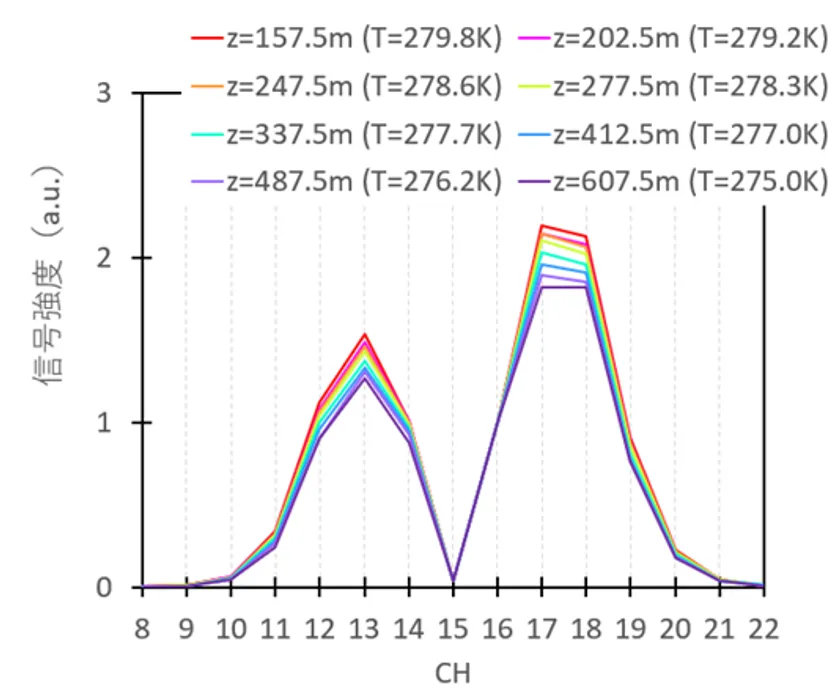
図4 高度別の規格化した純回転ラマンスペクトルの計測例-2019年12月24日-京都大学信楽MU観測所。
図4 高度別の規格化した純回転ラマンスペクトルの計測例(2019年12月24日 14:57、京都大学信楽MU観測所)。凡例の気温Tは、同時刻に放球のラジオゾンデ計測値を示す。CH15に数桁以上大きい弾性散乱波長の散乱光が入射しているが、開発した多波長分光検出器により除去できていることがわかる。
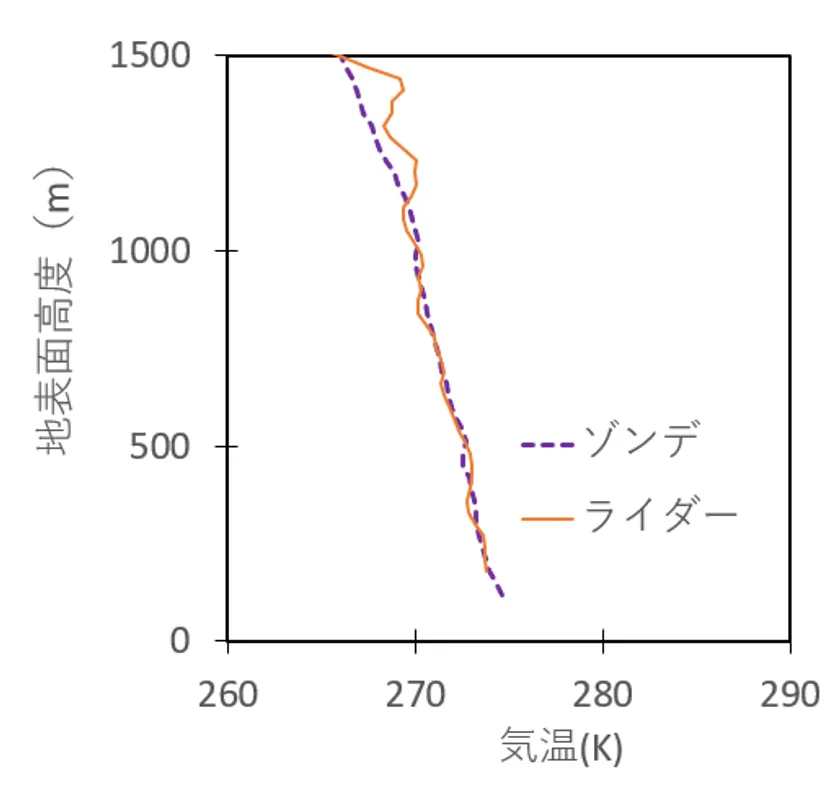
図5 ラジオゾンデと気温計測チャンネルのみのラマンライダーから求めた気温プロファイルの比較例-2019年12月05日-京都大学信楽MU観測所。
図5 ラジオゾンデと気温計測チャンネルのみのラマンライダーから求めた気温プロファイルの比較例(2019年12月05日 08:00-08:15 JST、京都大学信楽MU観測所)。高度約1,000mまで両観測が整合していることが分かる。
3.波及効果、今後の予定
水蒸気量に加えて気温の高度分布を昼夜問わず高精度かつ高い時空間分解能で安定に同時計測することが可能になりました。本結果を活用することで大気状態がより詳細に理解できるようになり、豪雨の予測精度が向上し、ひいては災害の低減に寄与することが期待されます。今後は、安定性や保守性の改善に取り組み、気温・水蒸気量を同時計測するラマンライダーの社会実装に向けた実用化を進める予定です。
4.研究プロジェクトについて
本研究開発は、京都大学生存圏研究所と英弘精機株式会社の共同研究の成果です。本研究の一部は、公益財団法人東京都中小企業振興公社「平成30年度 新製品・技術開発助成事業」、新エネルギー・産業技術総合開発機構(NEDO)「平成25年度 イノベーション実用化ベンチャー支援事業」の一環として行われました。
■英弘精機株式会社について
英弘精機は90年以上にわたり、再生可能エネルギー、環境科学、および物性分析分野において優れた製品の販売及びサービスを提供、高品質と高い信頼性で社会に貢献してきました。英弘精機で設計、製造された計測機器は現在、世界各国に展開されており、継続的な革新、業界をリードするターンキー製品、そして妥協のない品質へのこだわりにより、環境研究や再生可能エネルギーに関連する様々なプロジェクト、および物性分析関連の研究や技術開発をサポートしています。
英弘精機は、公的な試験結果を得るために行なう試験プロセスや、公的な校正結果を得るために行う校正プロセスを、国際的に認定するための基準として用いられる規格であるISO/IEC17025に関して、2013年に液体の粘性試験及び回転粘度計の校正、直達及び全天日射計の校正について認定を取得し、パートナーやお客様にEKOの計測機器と校正方法の精度と信頼性に付加なる確実性を提供しています。
詳細情報は https://eko.co.jp またはhttps://www.facebook.com/ekoinstruments/ をご覧ください。
■用語解説
※1 深紫外波長:波長100nm~280nmの紫外光で、太陽光に含まれる深紫外波長の光は成層圏に存在するオゾン層で吸収されて地上にはほとんど到達しないため、ソーラーブラインド波長とも呼ばれています。光を用いるライダーでは太陽光が観測の妨げとなりやすいですが、ソーラーブランド波長を用いるライダーは日中の太陽光の影響を受けにくくなります。
※2 迷光:光学機器内部などで発生する信号光以外の不必要な散乱光をさします。ラマンライダーでは、ラマン散乱光よりも強度が数桁大きい弾性散乱光を可能な限り除去することが重要になります。
※3 線状降水帯:次々と発生する発達した雨雲が連なり、長時間にわたって停滞することで大雨を降らせる現象。大雨により河川の氾濫等の原因となることから、より早期の予測が求められています。
※4 大気境界層:地上から高度1~2kmまでの地表近くに位置する層で、地表付近の熱や水蒸気、大気の運動量を効率よく鉛直輸送する領域です。
※5 ラマンライダー:大気中にレーザーを照射し、大気分子によって散乱されたラマン散乱光※6を分光計測する装置です。レーザーを照射してから受信するまでの時間から距離を、散乱強度から各大気分子の濃度に関連した情報を得ることができます。
※6 ラマン散乱光:光と分子の相互作用のうち、照射した光に対して波長の異なる散乱光(非弾性散乱の一部)です。ラマン散乱光は、入射光より波長が長いストークス散乱光と入射光より波長が短いアンチストークス散乱光に分けられます。ラマンライダーでは、分子の種類ごとに散乱波長のシフト幅が大きく異なる振動ラマン散乱光を水蒸気量の計測に、温度により波長のシフト幅がわずかに異なる回転ラマン散乱光を気温の計測に用います。
※7 弾性散乱光:入射光と同じ波長で散乱される光で、大気中では空気分子によるレイリー散乱やエアロゾルによるミー散乱に対応します。ラマン散乱光に比べて、数桁以上大きな散乱強度を示します。
※8 干渉フィルター:特定の波長の光を透過・反射させる光学フィルターです。
※9 アレイ検出器:アレイ状に配置された複数の光検出素子で構成される検出器。分光器の検出面に設置すると、波長ごとの信号(スペクトル)が得られます。
■研究者のコメント(矢吹 正教)
約10年かけて構築した迷光の影響が少ない光学系による観測から、気温が推定できるところまで来ました。今後は激甚化する気象水災害に対応すべく、社会実装に向けた取組を推進していきたいと思います。