ブイエムシー、産業技術総合研究所と ロボットシミュレータ開発に関する共同研究契約を締結
商品
2017年8月22日 10:30運動シミュレータ販売において長い実績を誇る株式会社ブイエムシー(本社:名古屋市、代表取締役:永瀬 純)は、国立研究開発法人 産業技術総合研究所(以下 産総研)とロボットシミュレータ開発の共同研究契約を締結したことを発表します。
この研究は、スウェーデンの物理エンジン開発企業Algoryx Simulation AB(本社:Sweden、CEO:Kenneth Bodin、以下 Algoryx)とも連携して実施し、Algoryxが開発する物理エンジン(注1)「AGX Dynamics」を、産総研が開発を進めるロボットシミュレータ「Choreonoid(コレオノイド)」へ実装し、現在のロボットシミュレータでは困難な複雑、多様なロボット、さまざまな災害現場環境のシミュレーションに対応できるロボットソフトウェアの開発を目指します。
近年ロボットが活用される範囲が広がっていますが、その一つとして災害時における調査、救助、復興支援などを行う災害対応ロボットがあげられます。特に日本は、甚大な災害につながる地震、台風といった自然災害の多い国であり、近年災害対応ロボットの開発が積極的に行われています。2011年3月に発生した東日本大震災、および福島原子力発電所の事故では、人が立ち入ることが困難なエリアで活動するロボットの必要性が認識され、実際に多くのロボットが現場投入されました。
ロボットは、ハードウェア、ソフトウェアと多くの要素技術により構築されています。その中でも、特に災害対応ロボットは、多種多様な環境の災害現場で使用され、求められる作業も多様なものとなります。そのためロボットのタイプは、脚型、ヘビ型、クローラ(注2)型、ヒューマノイド(注3)型、マルチコプターなど多岐にわたり、また、関連するテクノロジーも、制御技術、センサー、通信、遠隔操作など多くの技術分野との連携が必要になります。
シミュレーション上で再現が必要な災害環境は多様で、かつ関連する技術要素が多いことから考えると、費用、効率の点から、災害対応ロボットの開発、動作検証には、シミュレータの活用が有効ですが、現状では、多様なタイプの災害対応ロボットを高精度にシミュレートできるシミュレータは存在しておらず、その開発が急務となっています。
この課題に対し、この度ブイエムシーは、産総研と共同研究契約を締結し、産総研が開発するロボットシミュレータ「Choreonoid」へ、Algoryxが開発する物理エンジン「AGX Dynamics」を実装し最適化を行うことにより「Choreonoid」の機能追加、性能向上を推進する運びとなりました。
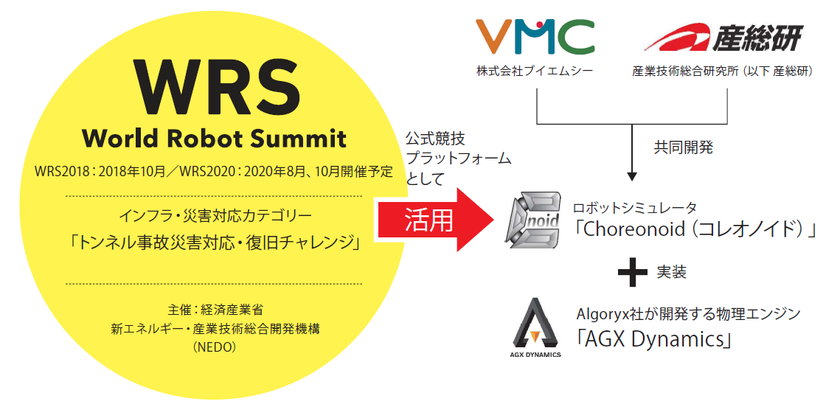
物理エンジン「AGX Dynamics」を実装した「Choreonoid」は、2018年10月に開催される「World Robot Summit 2018」のトンネル事故災害対応・復旧競技、並びに2018年から順次開所予定の「福島ロボットテストフィールド」に設置される模擬プラント用ロボットシミュレータ、現在研究・開発が進むImPACT「タフ・ロボティクス・チャレンジ」の評価用シミュレータなど、災害対応ロボット開発に関する幅広い用途への活用が期待されています。
(注1)物理エンジン:シミュレーション内で生じる物理現象・挙動を計算するためのソフトウェア。物理運動シミュレータの一部を構成し、シミュレーション速度、正確性を左右する重要な部品となる。
(注2)クローラ:無限軌道とも呼ばれ、軟弱な地形、凹凸の激しい地形など悪路での走行性能を向上させるために、履板を、前後輪を囲むように一帯に接続した構造。建設機械に多く用いられる。
(注3)ヒューマノイド:ヒトに似せた形状のロボット。
■共同研究概要
共同研究により以下の機能追加と性能向上を目指します。
(1)機能追加
●災害対応ロボットが行う作業を実現するための機能
・クローラモデルの精緻なシミュレーションと不整地踏破
・災害現場で必要な物体の破壊
・消火ホースを使った消火活動
・多量な瓦礫などの除去・運搬
・変形地面の再現
・電源ケーブル取り回しなどのケーブルシミュレーション
(2)性能向上
●同時にシミュレーションを行うことができる環境の規模拡大
●シミュレーションの安定性向上
<参考URL>
・World Robot Summit
http://worldrobotsummit.org/
・福島ロボットテストフィールド
https://www.pref.fukushima.lg.jp/sec/32021f/test-field.html
(福島県ホームページより)
・革新的研究開発推進プログラムImPACT「タフ・ロボティクス・チャレンジ」
http://www.jst.go.jp/impact/program/07.html
(内閣府ホームページより)
■「Choreonoid(コレオノイド)」について
「Choreonoid」は、産総研で開発されている統合ロボットシミュレータです。高機能なグラフィカルユーザインタフェースと高速、高精度なシミュレーション性能を有しており、産総研での二足歩行ヒューマノイドロボットの研究開発に活用されています。2011年からはオープンソースソフトウェアとして一般にも公開されており、国内外の多くのロボット研究開発機関で利用されています。「Choreonoid」はプラグインと呼ばれるソフトウェアモジュールを追加することで機能の拡張が可能な設計となっており、今回の共同研究では、この仕組みを活用して、「AGX Dynamics」の「Choreonoid」への実装を実施します。シミュレーション機能に限らず、ロボットの動作振り付け、動作計画、遠隔操作といったより応用的な機能を追加することも可能で、それらの機能とシミュレーション機能を連携させることにより、ロボットの開発や運用を効率的に行うことが可能となります。
参考URL: http://choreonoid.org/
■「AGX Dynamics」について
高速性と正確性を両立し、高い安定性を誇る最先端の物理エンジンです。多くの訓練シミュレータ、エンジニアリング用途シミュレーション、大規模な粒子シミュレーションなどで活用されています。
Algoryxが開発を行い、日本ではブイエムシーが販売、サポート提供を行っています。
【株式会社ブイエムシーについて】
1999年の創業以来、真に使える車両運動シミュレーションに特化したソフトウェアツールを提供。2015年4月に車両運動シミュレータ事業部門を分社化し、バーチャルメカニクスとして継承。同時に元会社名をブイエムシーに変更し、物理エンジンを軸に「AGX Dynamics」の普及と、カスタムシミュレーションツールの企画開発を行っている。
URL: http://www.vmc-motion.com/
【Algoryx Simulation ABについて】
2007年にスウェーデンのウメオ大学の研究室からスピンアウトした研究者によって設立された物理エンジン開発に特化したベンチャー企業。2011年スウェーデンを代表するトップ20ベンチャーに選ばれ、将来有望なベンチャー企業としてBusiness World(Sweden)誌により表彰。European Business AwardsやDeloitte Technology Fast50などにも選出されている。
URL: https://www.algoryx.se/
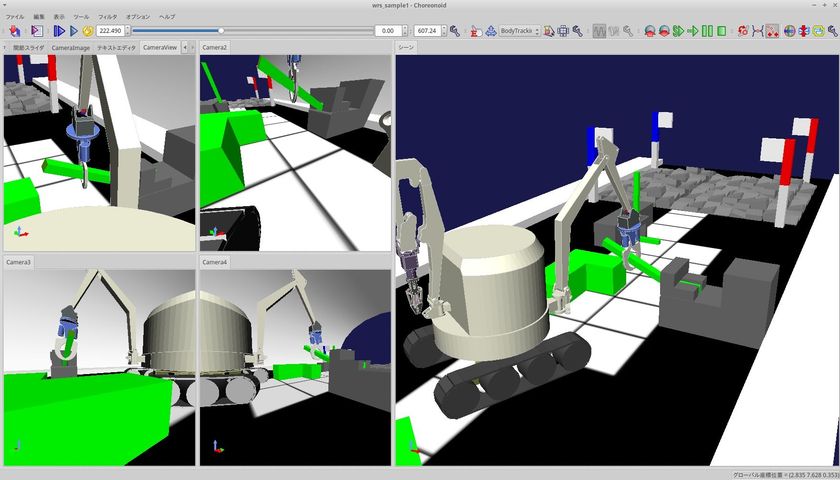
Choreonoidイメージ(1)
この研究は、スウェーデンの物理エンジン開発企業Algoryx Simulation AB(本社:Sweden、CEO:Kenneth Bodin、以下 Algoryx)とも連携して実施し、Algoryxが開発する物理エンジン(注1)「AGX Dynamics」を、産総研が開発を進めるロボットシミュレータ「Choreonoid(コレオノイド)」へ実装し、現在のロボットシミュレータでは困難な複雑、多様なロボット、さまざまな災害現場環境のシミュレーションに対応できるロボットソフトウェアの開発を目指します。
近年ロボットが活用される範囲が広がっていますが、その一つとして災害時における調査、救助、復興支援などを行う災害対応ロボットがあげられます。特に日本は、甚大な災害につながる地震、台風といった自然災害の多い国であり、近年災害対応ロボットの開発が積極的に行われています。2011年3月に発生した東日本大震災、および福島原子力発電所の事故では、人が立ち入ることが困難なエリアで活動するロボットの必要性が認識され、実際に多くのロボットが現場投入されました。
ロボットは、ハードウェア、ソフトウェアと多くの要素技術により構築されています。その中でも、特に災害対応ロボットは、多種多様な環境の災害現場で使用され、求められる作業も多様なものとなります。そのためロボットのタイプは、脚型、ヘビ型、クローラ(注2)型、ヒューマノイド(注3)型、マルチコプターなど多岐にわたり、また、関連するテクノロジーも、制御技術、センサー、通信、遠隔操作など多くの技術分野との連携が必要になります。
シミュレーション上で再現が必要な災害環境は多様で、かつ関連する技術要素が多いことから考えると、費用、効率の点から、災害対応ロボットの開発、動作検証には、シミュレータの活用が有効ですが、現状では、多様なタイプの災害対応ロボットを高精度にシミュレートできるシミュレータは存在しておらず、その開発が急務となっています。
この課題に対し、この度ブイエムシーは、産総研と共同研究契約を締結し、産総研が開発するロボットシミュレータ「Choreonoid」へ、Algoryxが開発する物理エンジン「AGX Dynamics」を実装し最適化を行うことにより「Choreonoid」の機能追加、性能向上を推進する運びとなりました。
物理エンジン「AGX Dynamics」を実装した「Choreonoid」は、2018年10月に開催される「World Robot Summit 2018」のトンネル事故災害対応・復旧競技、並びに2018年から順次開所予定の「福島ロボットテストフィールド」に設置される模擬プラント用ロボットシミュレータ、現在研究・開発が進むImPACT「タフ・ロボティクス・チャレンジ」の評価用シミュレータなど、災害対応ロボット開発に関する幅広い用途への活用が期待されています。
(注1)物理エンジン:シミュレーション内で生じる物理現象・挙動を計算するためのソフトウェア。物理運動シミュレータの一部を構成し、シミュレーション速度、正確性を左右する重要な部品となる。
(注2)クローラ:無限軌道とも呼ばれ、軟弱な地形、凹凸の激しい地形など悪路での走行性能を向上させるために、履板を、前後輪を囲むように一帯に接続した構造。建設機械に多く用いられる。
(注3)ヒューマノイド:ヒトに似せた形状のロボット。
■共同研究概要
共同研究により以下の機能追加と性能向上を目指します。
(1)機能追加
●災害対応ロボットが行う作業を実現するための機能
・クローラモデルの精緻なシミュレーションと不整地踏破
・災害現場で必要な物体の破壊
・消火ホースを使った消火活動
・多量な瓦礫などの除去・運搬
・変形地面の再現
・電源ケーブル取り回しなどのケーブルシミュレーション
(2)性能向上
●同時にシミュレーションを行うことができる環境の規模拡大
●シミュレーションの安定性向上
<参考URL>
・World Robot Summit
http://worldrobotsummit.org/
・福島ロボットテストフィールド
https://www.pref.fukushima.lg.jp/sec/32021f/test-field.html
(福島県ホームページより)
・革新的研究開発推進プログラムImPACT「タフ・ロボティクス・チャレンジ」
http://www.jst.go.jp/impact/program/07.html
(内閣府ホームページより)
■「Choreonoid(コレオノイド)」について
「Choreonoid」は、産総研で開発されている統合ロボットシミュレータです。高機能なグラフィカルユーザインタフェースと高速、高精度なシミュレーション性能を有しており、産総研での二足歩行ヒューマノイドロボットの研究開発に活用されています。2011年からはオープンソースソフトウェアとして一般にも公開されており、国内外の多くのロボット研究開発機関で利用されています。「Choreonoid」はプラグインと呼ばれるソフトウェアモジュールを追加することで機能の拡張が可能な設計となっており、今回の共同研究では、この仕組みを活用して、「AGX Dynamics」の「Choreonoid」への実装を実施します。シミュレーション機能に限らず、ロボットの動作振り付け、動作計画、遠隔操作といったより応用的な機能を追加することも可能で、それらの機能とシミュレーション機能を連携させることにより、ロボットの開発や運用を効率的に行うことが可能となります。
参考URL: http://choreonoid.org/
■「AGX Dynamics」について
高速性と正確性を両立し、高い安定性を誇る最先端の物理エンジンです。多くの訓練シミュレータ、エンジニアリング用途シミュレーション、大規模な粒子シミュレーションなどで活用されています。
Algoryxが開発を行い、日本ではブイエムシーが販売、サポート提供を行っています。
【株式会社ブイエムシーについて】
1999年の創業以来、真に使える車両運動シミュレーションに特化したソフトウェアツールを提供。2015年4月に車両運動シミュレータ事業部門を分社化し、バーチャルメカニクスとして継承。同時に元会社名をブイエムシーに変更し、物理エンジンを軸に「AGX Dynamics」の普及と、カスタムシミュレーションツールの企画開発を行っている。
URL: http://www.vmc-motion.com/
【Algoryx Simulation ABについて】
2007年にスウェーデンのウメオ大学の研究室からスピンアウトした研究者によって設立された物理エンジン開発に特化したベンチャー企業。2011年スウェーデンを代表するトップ20ベンチャーに選ばれ、将来有望なベンチャー企業としてBusiness World(Sweden)誌により表彰。European Business AwardsやDeloitte Technology Fast50などにも選出されている。
URL: https://www.algoryx.se/