施工中の工事現場で、自動運転ショベルを長期安定運用
安藤ハザマ(本社:東京都港区、代表取締役社長:国谷 一彦)とコベルコ建機株式会社(本社:東京都品川区、代表取締役社長:山本 明、以下、「コベルコ建機」)は、このたび、自動運転ショベルの実用化を見据えて、施工中の工事現場における長期間の安定運用と安全性の確保について検証しました。

自動運転によるダンプ積込みの様子
1. 開発の背景と経過
安藤ハザマとコベルコ建機は、建設現場の生産性向上と現場無人化による本質的な安全の確保の実現を目的に、油圧ショベルの自動運転システムの開発に取り組むため、2019年4月に共同研究に関する協定を締結し、工事現場での油圧ショベルの自動運転実現に向けてシステム開発と段階的な実証実験を重ねてきました。
<実証実験の経過>
2019年秋 :【自動運転思想の確認】
ティーチングとプレイバック(注1)による油圧ショベルの
単純な自動運転が行えることを確認
2020年秋 :【外部環境認識機能の実装】
土砂形状やダンプトラックの荷台位置を人工知能(AI)で
認知することにより、掘削、積込み位置を自動調整して、
現場の状況変化に対応できることを確認
2021年12月:【実作業環境での検証】
実作業環境での自動運転に必要な基本的機能と、
AIにより侵入物体や人を検知・認識し、距離測定することで、
危険度に応じた各種警報を自動的に発報するという
安全確保の仕組みを確認
2023年12月:【遠隔操作と自動運転の複合】
「K-DIVE(R)(注2)」と自動運転の複合稼働を
安全に行うためのルールを策定
2024年2月 :【施工管理要員のみで運転】
自動運転システムの設定から稼働開始まで半日で行い、
現場人員だけで日々のシステム操作を行えることを確認
2. 本実証実験の概要と効果
これまでの実証を通じて、機能面、安全面、運用面から短期間の自動運転ショベルの稼働は問題なく行えることを確認できていましたが、今回は、安藤ハザマが施工中の「R5霞ヶ浦導水石岡トンネル(第3工区)新設工事(注3)」において、長期間の安定運用と安全性の確保について検証しました。
本検証により確認された効果は以下のとおりです。
(1)施工中の現場で、約2カ月間、自動運転ショベルを運用
油圧ショベルの自動運転を行い、有人ダンプへの掘削土砂積込作業を繰り返し行いました。シールド掘削現場特有の土砂の排出量や土砂質の環境変化に対しては、現場人員がタブレットによる調整機能を使って柔軟に対応しました。また、ダンプトラックの停車位置の変化には、ARマーカなどを使わない新たに開発した物体検知機能で対応し、実工事において約2ヵ月間(2025年4月~6月)にわたる長期運用を実現しました。
(2)遠隔操作やエリア監視機能等の利用により、長期間の作業を安全に完了
国土交通省の「自動施工における安全ルールVer.1.0(注4)」に沿ってリスクアセスメントを実施し、無人エリアや中継エリア、立ち入り禁止エリアなどを設定しました。無人エリアでは、「K-DIVE(R)」による遠隔操作と自動運転を組み合わせて無人作業を実現させました。
車両走行路や建屋が近く、十分に自動施工エリアを確保できないなどの課題に対しては、自動運転ショベルによる動作経路逸脱検知機能や、現場に設置したレーザーバリアセンサとの連携などによるエリア監視機能を利用し、長期にわたる作業を無事故で安全に完了しました。

遠隔操作との組み合わせによる運用
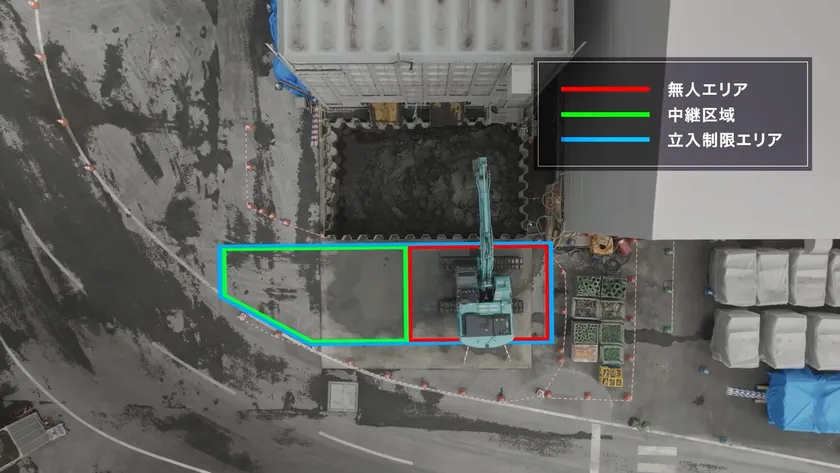
安全ルールVer1.0に沿ったエリア設定
3. 今後の展開
今回の検証により、現場における自動運転ショベルの本格展開、実用化が可能と判断しています。安藤ハザマとコベルコ建機は、これらの共同研究の成果をもとに、今後、自動運転ショベルの適用工種の拡大と現場展開に向けた取り組みをより一層加速させていきます。
4. 第7回国際 建設・測量展(CSPI EXPO 2025)への出展
「第7回国際 建設・測量展(CSPI EXPO 2025)」内の「コベルコ建機ブース」にて、本技術についてのパネル展示と動画上映を行ないます。
開催期間: 2025年6月18日(水)~6月21日(土)
開催場所: 幕張メッセ(千葉市美浜区中瀬2-1)
リンク先: https://cspi-expo.com/
(注1)自動運転ショベルにおいて、ティーチングとはプログラム作成のために重機の動作を「記録」すること。
プレイバックとはその記録した動作を「再生」すること。
(注2)K-DIVE(R)
https://www.kobelco-kenki.co.jp/dx/kdive.html
「K-DIVE(R)」はコベルコ建機株式会社の登録商標です
(注3)R5霞ヶ浦導水石岡トンネル(第3工区)新設工事
発注者 :国土交通省 関東地方整備局 霞ヶ浦導水工事事務所
施工者 :安藤ハザマ
工期 :2023年6月3日~2026年6月30日
工事場所:茨城県東茨城郡茨城町上飯沼地先~茨城県小美玉市堅倉
工事概要:泥水式シールド工法 延長4,880m、仕上内径3.5m
(注4)自動施工における安全ルールVer.1.0